[4.2]Greedy Algorithm - Shortest Path & MST
在[4-1]Greedy Algorithm - Analysis之後,我們要來看經典的應用Shortest Path 和 Minimum Spanning Tree。
Shortest Path
要找到任意單一點s到其他所有點的最短路徑。
設計演算法
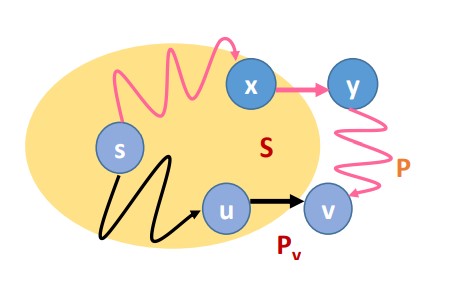
維持一集合S儲存"我們已經決定可從s到達的最短路徑的點",稱這部分為圖G中"explored"的部分。最初S={s}且d(s)=0。接者我們對V-S當中每一點去找可由S中的點所連接起來的最短路徑。
Dijkstra's Algorithm
Dijkstra's Algorithm (G,l)
Let S be the set of explored nodes
For each u∈S, we store a distance d(u)
Initially S={s} and d(s)=0
While S ≠ V
Select a node v ∉ S with at least one edge from S for which d(v)′=MINe=(u,v):u∈s d(u)+le is as small as possible
Add v to S and define d(v)=d′(v)
EndWhile
分析演算法
定理1
考慮集合S在演算法執行中的任一階段。對於每個S中的元素u,path Pu是最短的s-u路徑。
證明
以歸納法,當|S|=1時肯定為真。假設當|S|=k時的情況,K>=1也為真。現在將|S|變為k+1,藉由加入點v,且(u,v)是s-v路徑Pv的最後一邊。
根據歸納法的假設,Pu是s-v的最短路徑,其中u屬於S。現在考慮另外一條s-v路徑P,我們希望可以證明其至少跟我們的路徑Pv一樣長。
為了到達v,P路徑一定會在某一地方離開集合S,令y為離開S後的第一個點,而x是y前面的一點且屬於S。P不可能比Pv還短,因為在離開S時,P就已經至少和Pv一樣長 : 在這第k+1迴圈中,Dijkstra 演算法肯定有考慮將y加入S(透過x),但其拒絕了這個選擇而加入了v,代表路徑P(s-x-y)一定大於路徑Pv(s-u-v)
另一證明
P'是s-x的子路徑,因為x屬於S,所以根據假設Px是到x的最短路徑(路徑長為d(x)),得到 l(p') > l(px) =d(x),所以經由P至y的路徑長為 : l(p') + l(x,y) > d(x)+l(x,y) >= d'(y),且完整路徑P至少和這一路徑一樣長。最後,因為該演算法在這一回合是挑選v,代表d'(y) >= d'(v) = l(Pv)。綜合上述,可得l(P) >= l(p')+l(x,y) >= l(Pv)
兩個觀察
當有邊上的路徑長度為負值時,該演算法無法找到最短路徑
該演算法其實比上面敘述的更簡單,可以說是 持續地 執行BFS
像是水在水管中依序流到游進到遠的節點
實行與時間複雜度
對於有n個點的圖來說,while loop會執行n-1次,每一次都會加入一點v到S,如何選擇v是相對需要投入心力的部分。從演算法直接來看的話,我們每次要加入點v(v不屬於S)會需要找從S到v的所有邊長,若圖形G有m條邊,那麼這步驟就需要O(m),整個執行完就是O(mn)。
更好的資料結構
上面步驟可能會讓執行時間很長,我們可以建立Min Heap來免去每次需要再掃描每條邊的動作,因此,時間複雜度會變成 O(m)+取出最小值並回復成heap的時間 = O(mlogn)
MST
問題 : 一地點集合V = {v1,v2,...vn}要讓集合內每一點相通。
定理4.16
T是我們找到的最小成本的解,那麼(V , T)必定為一棵樹。
證明
根據定義 (V , T)一定相連connected,我們要證明他也必定不含cycle。
假設含有一cycle C,而e是C當中的一個邊。我們宣稱(V , T-{e})仍舊connected,因為之前通過e的路徑可以"繞遠路"以C的另一條邊到達目的地。那麼也就是說(V , T-{e})也是一個合理的解,而且因為少了e,成本又更小了,和假設矛盾(T是最小成本的解)
若我們允許一些邊的cost=0的話,也就是說我們只限定Ce是非負的,那麼這組求出來有最小成本的解可能包含許多額外的邊-這些cost=0的邊可以被刪除。僅管有這樣的情形,我們依舊總是可以找到有最小成本的解是一棵樹。
若(V , T)是一棵樹,我們稱這個子集合T⊆E是G的spanning tree,而根據上面定理4.16又可知道我們找到的是圖中最小成本的樹,因此又可稱為Minimum Spanning Tree。除非G是非常簡單(simple)的樹,否則通常會有非常多不同的解集合。
設計演算法
下面介紹三種貪婪演算法
Kruskal's Algorithm
從最小成本的邊開始,依序加入成本再大一些的邊,再加入時考慮加入邊e時會不會造成迴圈,若會的話則捨棄e,再找下一個邊。
Prim's Algorithm
有點像前面用Dijkstra's Algorithm找最短路徑。我們從任一點s開始,貪婪地希望從s長出一棵樹。在每一步,我們加入從現有的樹當中,能夠以最小成本所連接到的點。
更具體地說,我們維持一集合S⊆V來存放目前為所建立的spanning tree。最初,S={s},在每一迴圈,加入一點v到S中,其中v擁有最小的"附加成本(attachment cost)"MINe=(u,v):u∈S Ce,,也將邊e加入spanning tree。
Reverse-Delete Algorithm
像是使用"倒轉過來的(backward)或是說"Kruskal's Algorithm。初始狀態是一完整的G=(V , E),並開始以大到小的方式選取邊去做刪除的動作。
分析演算法 - 性質
上面的演算法都需要重複地進行"插入"及"刪除"的動作,所以要分析他們的話,可以從知道 甚麼狀況下進行這些動作是安全的。我們先採用簡化的方式,假設 : 所有邊的成本都是獨一無二的,之後再討論如何將這個假設拿掉。
When is it safe to include an Edge in the MST?
定理4.17 Cut property
假設所有邊的成本都是獨一無二的。令S為是點的子集合,且S非空集合也不包含整個點集合V,令邊e=(v,w)的兩端點連接S及V-S且是最小成本的邊。那麼每一個MST包含邊e。
證明
令T為一不包含e的ST(spanning tree),我們要證明T並非擁有最小可能的成本。以exchange argument來執行 : 我們會在T找到一邊e'的成本大於e,且有辦法在其他ST中將e'換成e,因此這樣就可以如我們所願使得ST總成本就會小於T。
重新回憶一下,e的兩端是點v及w,T是一棵ST,所以T當中必定存在一路徑P可從v到w。從v開始,遵循path,P存在一點w'屬於V-S。令v'屬於S是路徑P上w'的前一點,e' = (v' , w'),可得e'是T中的一條邊且一端在S一端在V-S。接者用e替換掉e',得到T' = T - {e'} + {e},再證明T'仍是一棵MST:
(V,T')肯定相連connected
(V,T)是相連的,任何(V,T)中使用e'的路徑在(V,T')可以被重新導向使用v' , v , (v,w) , w , w'
(V,T')沒有cycle
在(V,T'+{e'})中唯一的cycle是e和path P
e'一端點在S,一端點在V-S,而e也是,且e成本較低。所以最後可知T'的總成本小於T。
When can we guarantee an Edge is not in the MST?
定理4.20 Cycle property
假設所有邊的成本都是獨一無二的。C是G當中的一cycle,e是C中成本最高的邊。那麼e不屬於MST。
證明
令T為一包含e的ST(spanning tree),我們要證明T並非擁有最小可能的成本。以exchange argument來執行 : 用成本更低的邊來換掉e。
把T中的e刪除,使得其變成兩個components : S含有點v, V-S含有點w。所以我們想用來替換e的邊會連接兩個component,使其重新變回一棵樹。根據定義,C中除了e之外的另一條邊也有一條路徑P可從v到w,所以用存在一條邊e'可連接S和V-S,T' = T - {e} + {e'},(V,T')是相連且沒有cycle的,另外在成本方面e>e',所以T'<T。
Sum up
事實上,任何產生spanning tree的演算法,只要是以 重複加入邊 (在cut property確保正確性之下)以及 重複刪除邊(在cycle property確保正確性之下)這兩種特性產生的,都會是MST。
分析演算法 - 正確性
The Optimality of Kruskal’s Algorithms
重點是 : 這兩個演算法只會在合理的時候加入新的邊(cut property)
定理4.18
Kruskal’s Algorithms 會產生G的MST。
證明
考慮任何被此演算法加入的邊e = (v,w) ,讓集合S是在e被加入之前v有一條路徑P上的所有點集合。因為加入e也不會形成cycle,所以代表v屬於S且w不屬於S。此外,目前尚未有S到V-S的邊,因為那樣的邊可以被加入且不造成cycle,那麼應該已經被加入了。所以e是成本最低的邊,且連接S和V-S,根據cut property,e屬於任何MST。
所以如果我們可以顯示輸出結果(V,T)是G的ST,就完成證明了。首先因為演算法的設計,所以(V,T)沒有cycle。(V,T)是否會不connected?不。(V,T)不connected就代表會被分成至少兩個components S和V-S,且沒有edge可與他們相連,而這違法演算法的設計:因為G是connected,至少會有一條邊連接他們,當遇到時演算法會將此邊加入。
The Optimality of Prim’s Algorithms
定理4.10
Prim’s Algorithms 會產生G的MST。
證明
我們將此演算法找到的解稱為S。用反證法,先假設S不是最小成本,令ES={e1,e2,...,en-1}為演算法產生的邊。U為MST,該MST含有數條邊,為ES序列前最長可能集合(it's a longest prefix of ES)。ei = {x,y}是演算法中第一條不屬於U被加入S的邊,讓W是點集合在ei加入之前,也代表U包含邊e1,e2,...,ei-1,但不包含ei。
在U當中必定存在一path使得x可到y,所以讓(a,b)是這條路徑上的第一條邊,其中a在W,b在W之外,如下圖
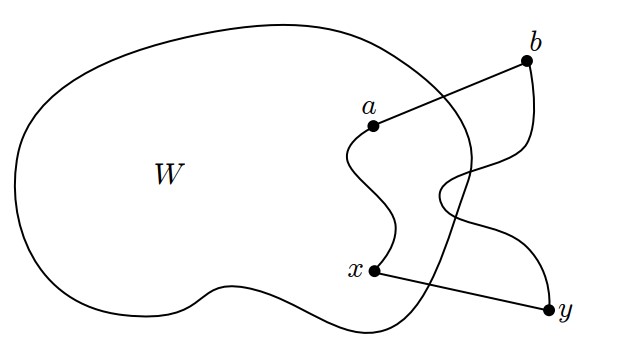
定義T = U + {x,y} - {a,b},且T是G的ST,對 {x, y} 、{a, b}這兩條邊的成本考慮下面三種可能的情形:
w({x, y}) > w({a, b})
{a,b}成本較小,所以演算法在此步驟應會選擇{a,b},違反{x,y}的假設。
w({x, y}) = w({a, b})
W(T) = W(U),所以T也是MST。此外,演算法尚未選到邊{a,b},這條邊不會是e1,e2,...,ei-1的其中一個,代表T包含e1,e2,...,ei,是一條比U還長的組合,違反tree U的定義。
w({x, y}) < w({a, b})
加入了成本較小的邊,W(T) < W(U),但這不可能,因為U是MST。
因為所有可能的情況都會造成矛盾,所以可知原始假設S非MST是錯誤的。
The Optimality of Reverse-Delete Algorithm
定理4.21
Reverse-Delete Algorithms 會產生G的MST。
證明
考慮一條被此演算法移除的邊e = {v,w},在他被移除的時候,他是存在Cycle C當中的。因為他是被演算法移除的邊,代表他是當下所有選擇中成本最高的邊,根據Cycle property,這條邊必定不屬於任何MST。
所以我們只要證明Reverse-Delete的輸出(V , T)是G的ST就完成了。首先(V , T)是connected,因為演算法不會刪除邊使得G變成disconnected。另外用反證法證明(V , T)不含cycle。假設(V , T)含有cycle C,考慮C上成本最高的邊e,這條邊是演算法碰到的第一個碰到的情形,這條邊應該被移除,因為不會造成圖G變成disconnected,這樣違反了Reverse-Delete的行為。
Sum up
最後我們要來消除 所有邊的成本都是獨一無二的這個假設。
有一個簡單的方法就是:將每一條邊的成本都加上一些不同的極小數字,讓他們可以變得獨一無二。現在原先有的邊的成本排序並不會被打亂,因為加入的成本非常非常小,只是足以讓有相同成本的邊變得有一點點不同。
實行Prim's Algorithm
如果有好的資料結構可以是O(mlogn)。
雖然證明正確性的方式和Dijkstra's 差很多,但是在實行上基本是相同的。我們一樣要決定哪一點應該被加入S當中,所以也是利用priority queue,共執行n-1次迴圈,每一回都都取出最小的並維持queue得正確性。 O(m)+取出最小值並回復成heap的時間 = O(mlogn)
實行Kruskal's Algorithm : The Union-Find Data Structure
在[3]Graph時有用過BFS、DFS都可以幫我們找到G的connected components。在Kruskal's Algorithm中會有些不同,因為我們會"動態"增加新的點到G當中,我們並不會希望每次都需要重新計算,因此我們需要使用叫做 Union-Find的資料結構。簡單來說,當我們要將e=(v,w)加入S時,需要辨認v和w是否已有相連,暫且稱v和w都有其"身分認證",若兩者身分相同代表已相連,則不加入e;若兩者身分不同,則將e加入。另外,加入後還需要有快速地方法將v和w的身分認證更新為相同的。其中,確認身分的行為稱為 Find;更新身分稱為 Union。
- MakeUnionFind(S) : 對集合S使用,回傳給我們Union-Find的資料結構,也就是說S當中的每一元素都被劃分成一個只包含自己的集合。這一步希望可以在O(n)的時間內完成,n=|S|。
- 對於S當中每一元素u,Find(u)會回傳包含u的這一集合的名稱。希望是O(logn),甚至可以是O(1)。
- 對於兩集合A、B,Union(A,B)會改變資料結構 : 合併集合AB成為單一集合。希望是O(logn)。
A simple Data Structure
一個可能是最簡單的方式 : 用一陣列儲存。
S={1,2,...,n}是有n個元素的集合,設定一陣列 Component[n],而component[s]就是含有s的集合的名稱。
MakeUnionFind(S)
初始化一陣列,其中對於所有屬於S的s,component[s] = s 。
Find(s)
O(1)
Union(A,B)
至多需要O(n),因為我們要去改集合A、B中所有元素s的component[s]的值。
Union這一步驟可以做一些改善,例如其實我們只需要改A或B其中一個的components的值,其中,又可以去記錄說集合A、B哪一個擁有的元素較少,這樣改起來比較有效率,但最差的情況仍有可能是O(n),不過這並不常發生,所以我們想要更精確地去描述所需要的時間。與其用the worst-case去界定 單一是Union operation 的執行時間的上限,我們以 一執行k次Union operations程序的總時間(或平均)。
定理4.23
考慮大小為n的集合S是一用陣列執行Union-Find的資料結構,且unions使用較大的集合作為名稱。MakeUnionFind需要O(n);Find需要O(1);任一執行k次Union operations的程序至多需要O(klogk)的時間。
證明
再提一次,一開始我們將S中n個元素都分為只包含自己的集合(因此共n個集合)。一次的Union動作至多牽涉2個這些原本只包含一元素的集合,所以在執行任k次Union程序後,至多2k個元素完全沒有被動過。現在考慮一特別的元素v,當v的集合參與了Union後,集合一定會變大。在Union時,一定有時候component[v]的值會被新,有些時候不會。但依據我們的慣例,使用較大的集合之名稱去做更改,所以每次更新component[v]時,擁有v的集合的大小會至少變為兩倍。集合v大小從1開始,最大為2k(因為前面所說至多剩下2k個完全沒動過的元素)。因此component[v]至多更新log(2K)次(log底數為2)在整個過程中。另外,至多2K個元素參與Union。所以得到上界為O(klogk)。
這樣的平均值行時間對於許多應用已經可以接受,但是我們可以試著改善,減少worst-case發生時會需要那麼多時間的成本,此方法也相對會需要提升Find到O(logn)。
A Better Data Structure
使用指標(pointer),每一點都會有依靠指標指到自己的集合紀錄。
MakeUnionFind(S):
將S內各元素u的指標指向自己(也就是目前他們屬於自己這個集合)。
Union :
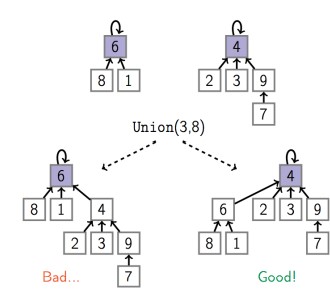
Union by rank : 用較小的tree去接較大的tree,如此一來會比較扁平,比較容易找到要找的元素
Find:
path compression : 指的是如下圖,當我們在find(6)=5後,讓從6找到5時所經過的所有點也都直接指向5,也可以讓結構變得更扁平。

實行Kruskal's Algorithm
如果有好的資料結構可以是O(mlogn)。
Kruskal's (G,c)
1.{e1,e2,...,em}=sorted edges in ascending order
2.T=∅
3.For each ei = (u,v)
4. if(u and v are not connected by edges in T)
5. T=T+{ei}
使用 UnionFind
將每一connected component維持為一不相交的集合(disjoint set)
Line1 : Sort edge cost
需要O(mlogm),因為兩點間至多就一條邊,因此m≦n^2,所以也可說是O(mlogn)
Line4 : 查看Find(u)和Find(v)是否相異,代表可以合併。(至多2m次)
Line5: Union(u,v) (至多n-1次)
時間複雜度 O(mlogn)